| إرشادات التكوين | الروبوت | صندوق التحكم | لوحة التعليم | الكابل | التطبيقات |
|---|---|---|---|---|---|
| قياسي |  | صندوق التحكم القياسي | لوحة التعليم القياسية (الدقة 1024*600، حجم الشاشة: 10.4 بوصة) | 5 أمتار | / |
| صندوق التحكم الصغير | | صندوق التحكم الصغير (وحدة الطاقة: اختيارية) | لوحة التعليم اللوحية (اختيارية) | 5 أمتار | يُستخدم للأتمتة، والروبوتات المتنقلة، وغيرها. |

| السمة | التفاصيل | |
|---|---|---|
| الأبعاد | 445.2 مم × 318.8 مم × (360+176) مم | |
| ارتفاع الارتفاع | 176 مم | |
| الوزن | 18.5 كجم | |
| خرج الطاقة | 48 فولت تيار مستمر | |
| درجة حرارة التشغيل | 0~50 درجة مئوية | |
| درجة حرارة التشغيل | رطوبة نسبية 90% (غير متكثفة الرطوبة) | |
| تصنيف IP | IP20 | |
| مستوى السلامة | الوصف | النتيجة |
|---|---|---|
| عدم الامتثال قد يؤدي إلى الوفاة أو إصابة خطيرة | تأكد دائمًا من تطابق إعدادات السلامة مع احتياجات التطبيق | |
| خطر الإصابة أو تلف المعدات | تأكد من أن جميع أجهزة السلامة والإعدادات مفعلّة بشكل صحيح | |
| قد يؤدي إلى تعطل المعدات | تجنب التعامل غير السليم والتعديلات غير المصرح بها |

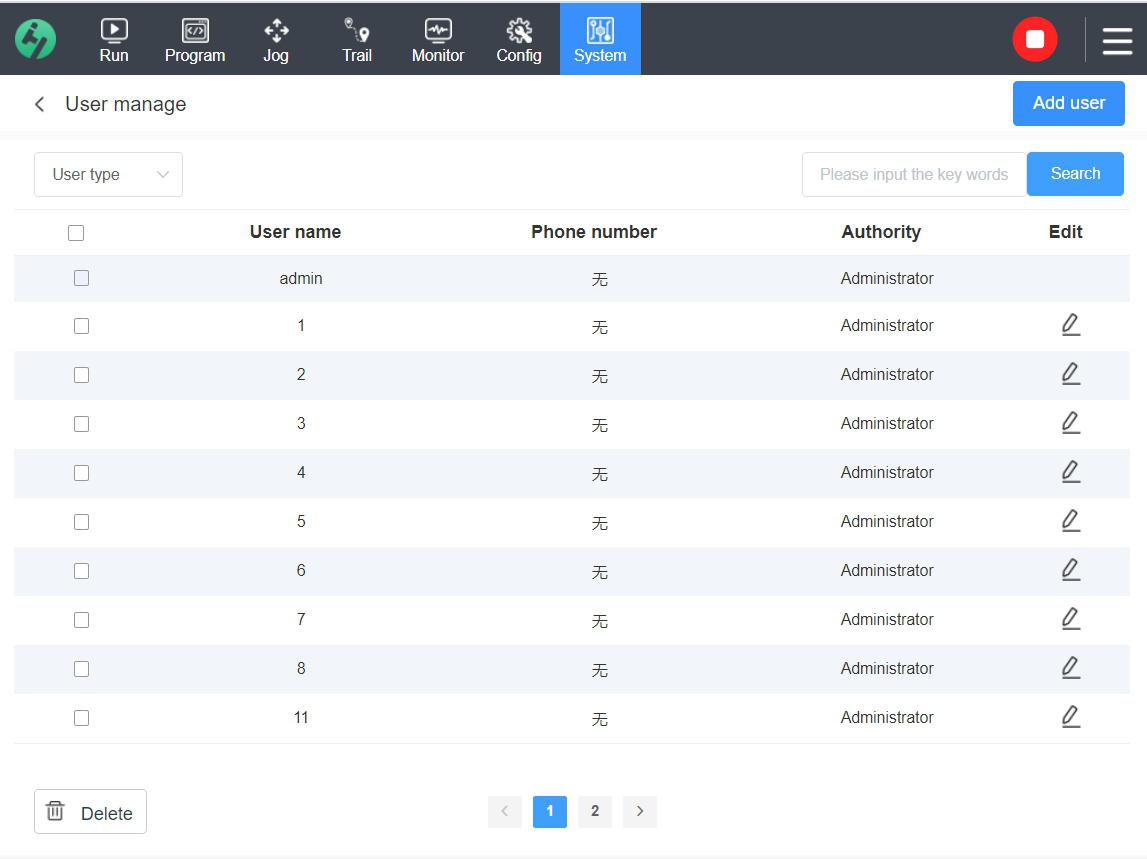
| جدول أذونات المستخدم | |
|---|---|
| دور المستخدم | حقوق الوصول |
| مدير النظام | وصول كامل إلى جميع وظائف الروبوت، بما في ذلك البرمجة والتكوين |
| مشغل | الوصول إلى التشغيل، والعمليات الجزئية (باستثناء حفظ النقاط)، ووظائف المراقبة |
| زائر | محدود إلى عمليات جزئية فقط، دون الوصول إلى البرمجة أو التكوين |
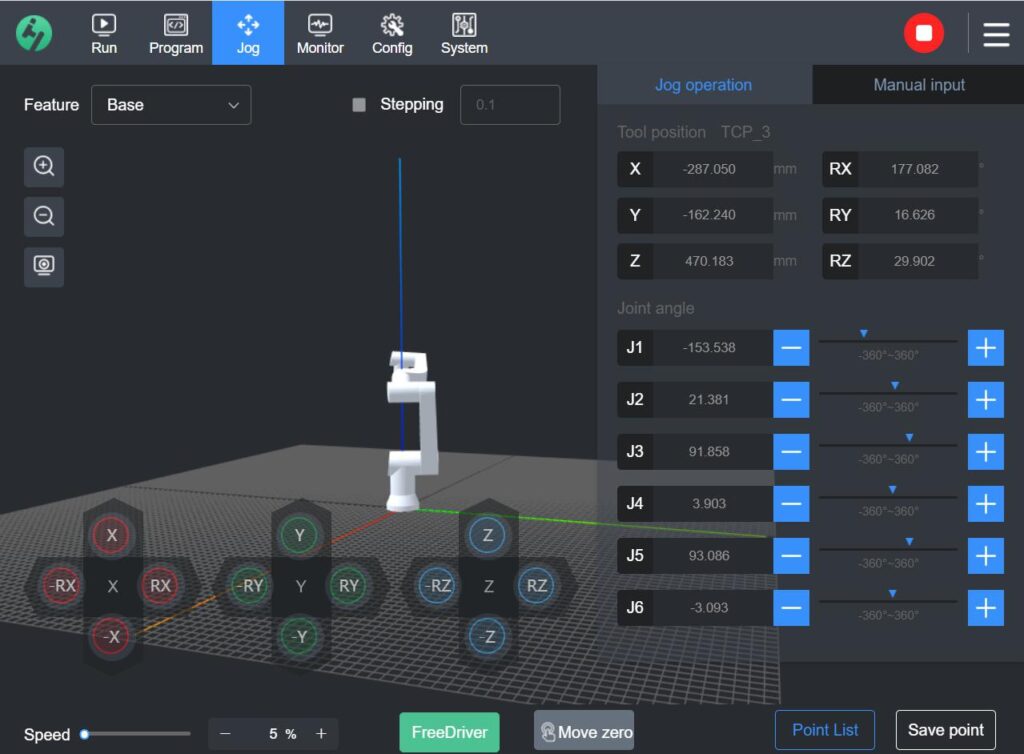
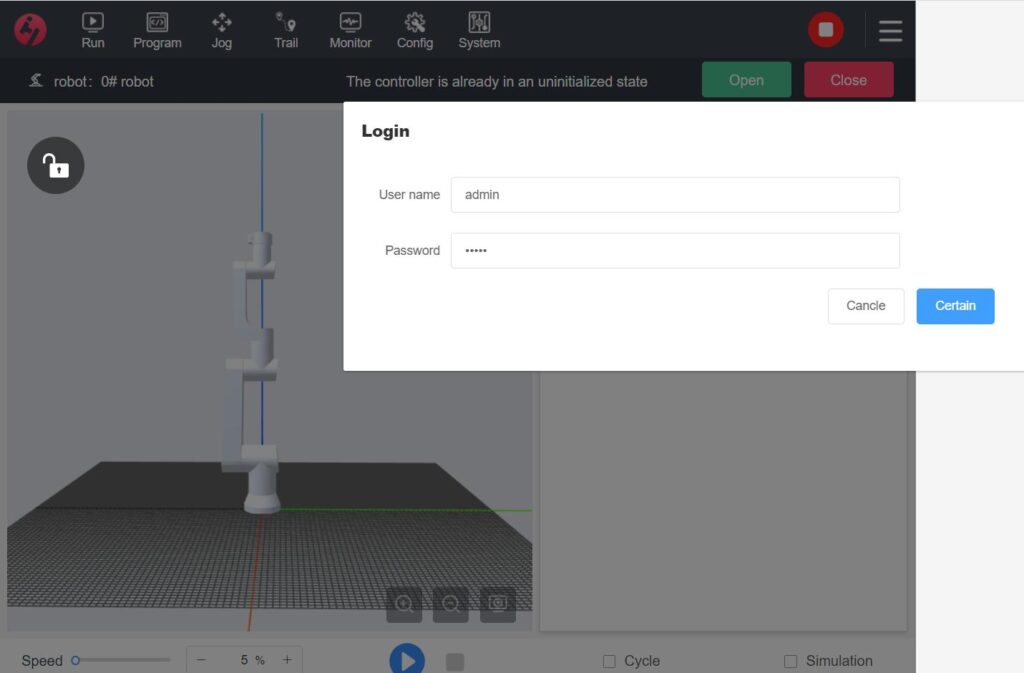
| العناصر الرئيسية في الواجهة | |
| لإقلاع الروبوت وتنفيذ البرامج. | |
| إنشاء وتعديل وإدارة نصوص الروبوت. | |
| مراقبة حالات المدخلات/المخرجات، وحالة الجسم، والسجلات في الوقت الفعلي. | |
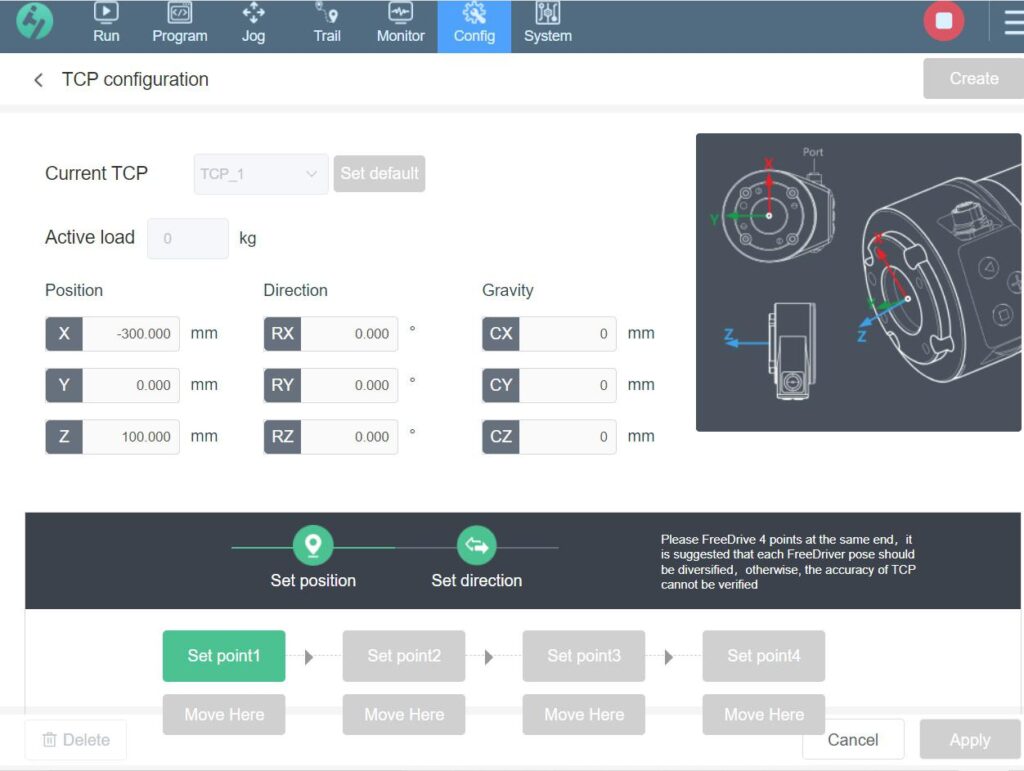
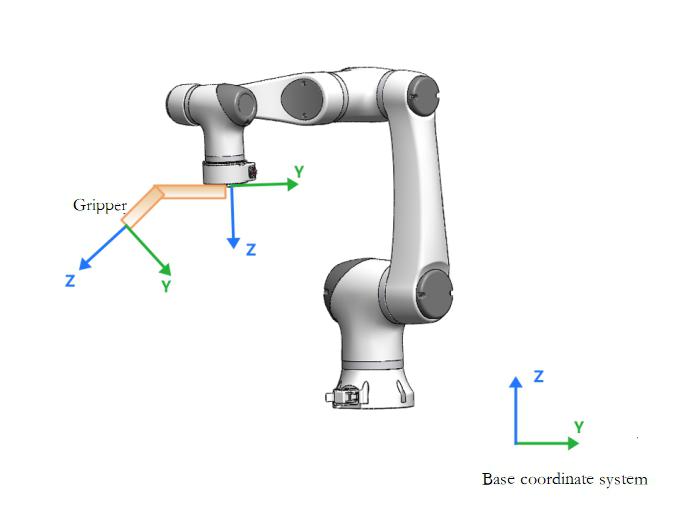
| تعيين معلمات الروبوت (TCP، زاوية التثبيت، إحداثيات المستخدم). | |
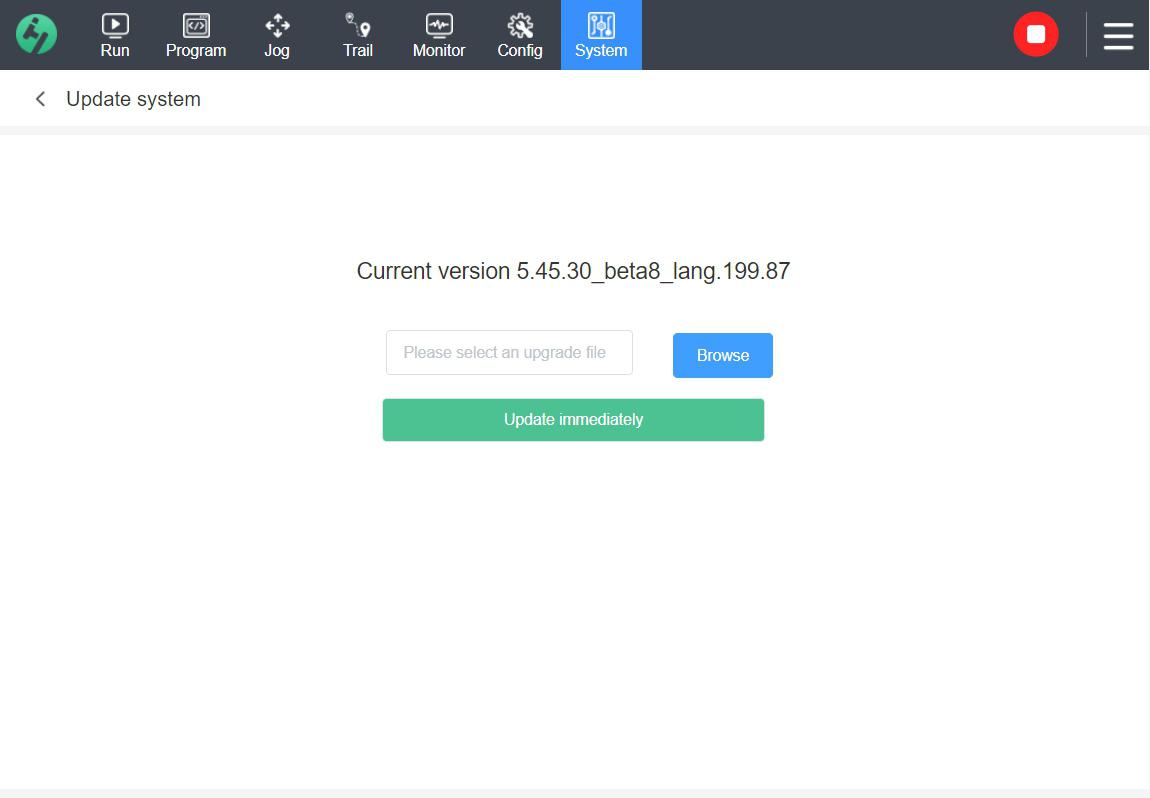
| إدارة حسابات المستخدمين وتحديث النظام. | |
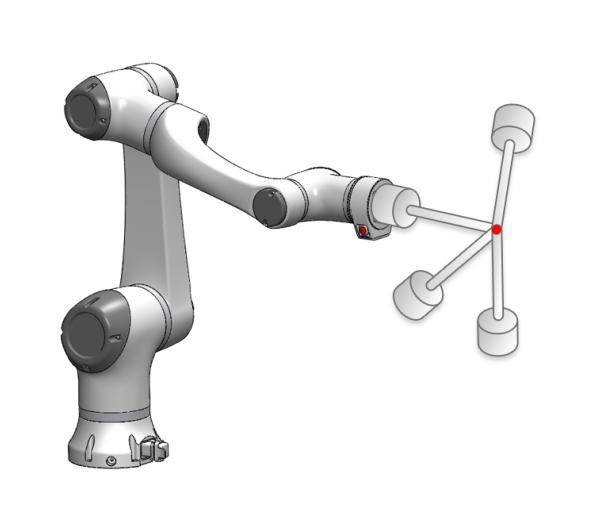
| تعديل وضعية الروبوت ومكانه يدويًا. | |