| Instrucciones de Configuración | Robot | Caja de Control | Pendiente de Enseñanza | Cable | Aplicaciones |
|---|---|---|---|---|---|
| Estándar |  |
Caja de control estándar | Pendiente de enseñanza estándar (Resolución 1024*600, tamaño de pantalla: 10.4 pulgadas) | 5m | / |
| Caja de control mini | |
Caja de control mini (Módulo de potencia: Opcional) | Pendiente de enseñanza en tablet (Opcional) | 5m | Aplicado para equipos de automatización, AGV, robots móviles, etc. |








| Nivel de Seguridad | Descripción | Resultado |
|---|---|---|
| El incumplimiento puede llevar a la muerte o lesiones graves | Siempre asegúrese de que la configuración de seguridad coincida con las necesidades de la aplicación | |
| Riesgo de lesión o daño al equipo | Asegúrese de que todos los dispositivos y configuraciones de seguridad estén correctamente activados | |
| Pueden resultar en un mal funcionamiento del equipo | Evite el manejo inadecuado y las modificaciones no autorizadas |

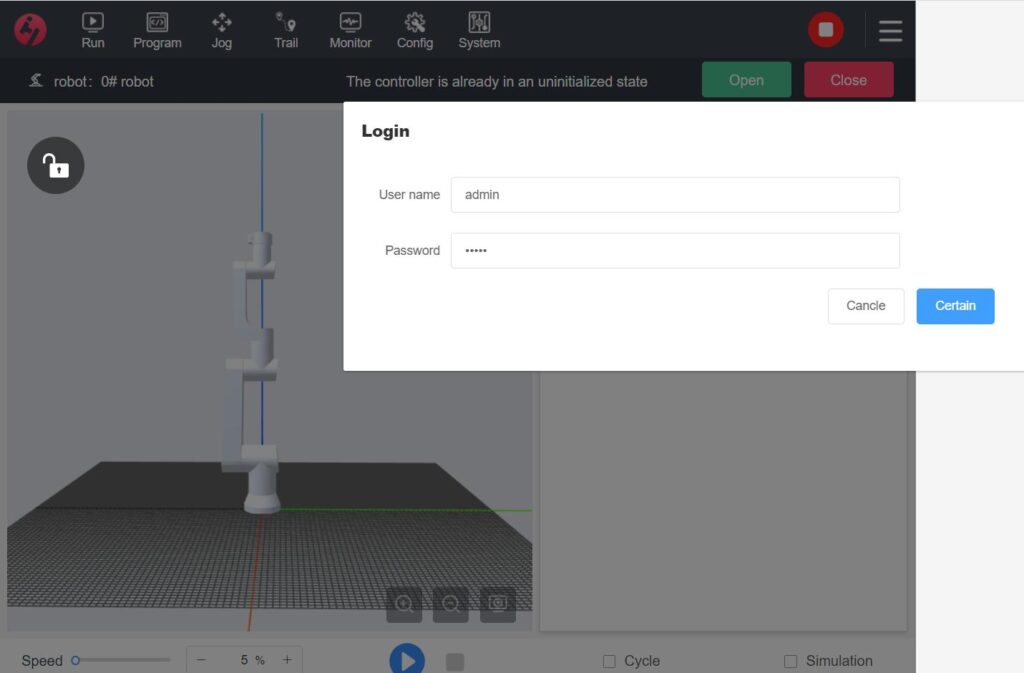
| Tabla de Permisos de Usuario | |
|---|---|
| Rol de Usuario | Derechos de Acceso |
| Administrador | Acceso completo a todas las funciones del robot, incluida la programación y configuración |
| Operador | Acceso a funciones de operación, avance lento (excluyendo la salvaguarda de puntos) y monitoreo |
| Visitante | Limitado solo a operaciones de avance lento, sin acceso a programación ni configuración |
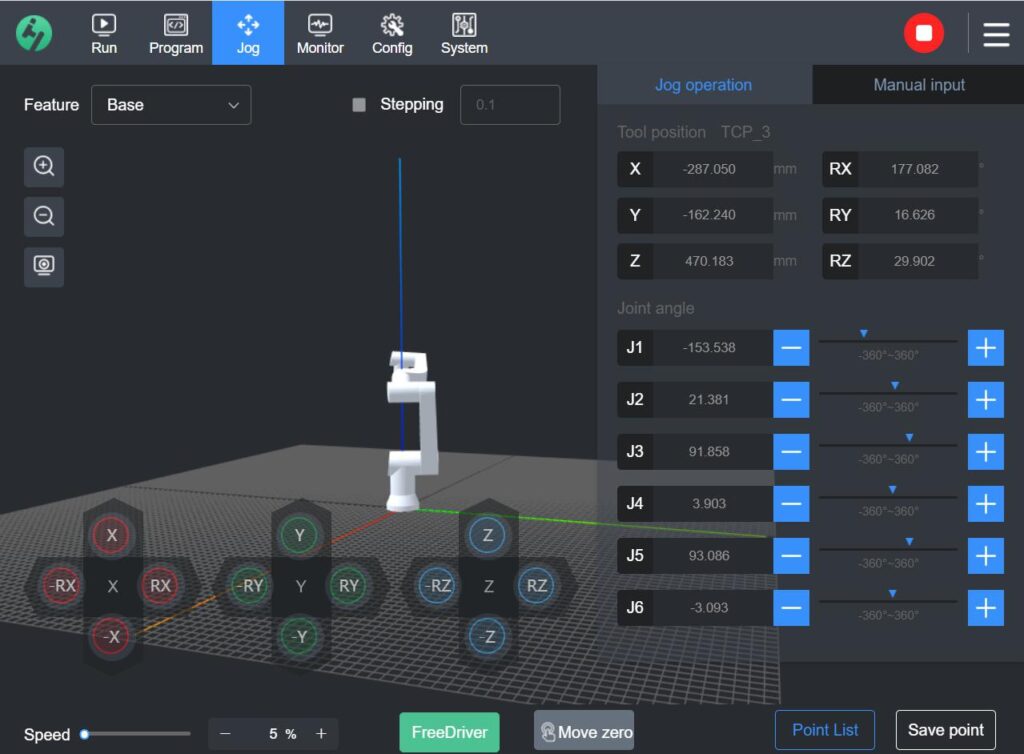
| Elementos Principales de la Interfaz | |
| Para el inicio del robot y la ejecución de programas. | |
| Crear, modificar y gestionar scripts del robot. | |
| Observar el estado de I/O, el estado del cuerpo y los registros en tiempo real. | |
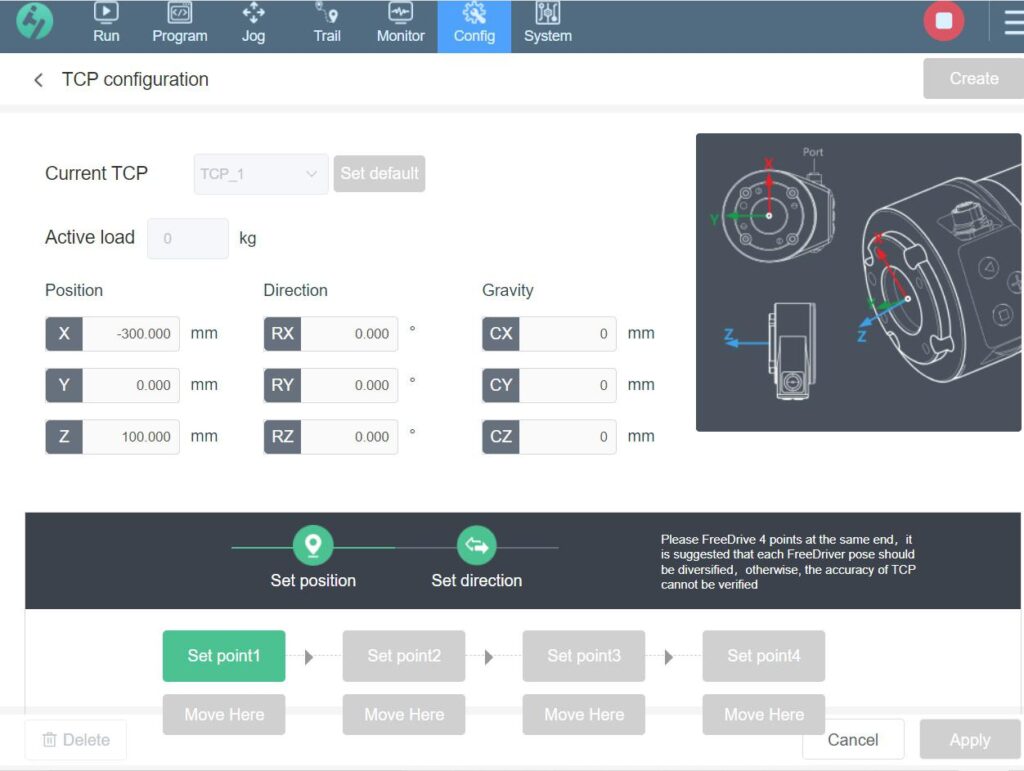
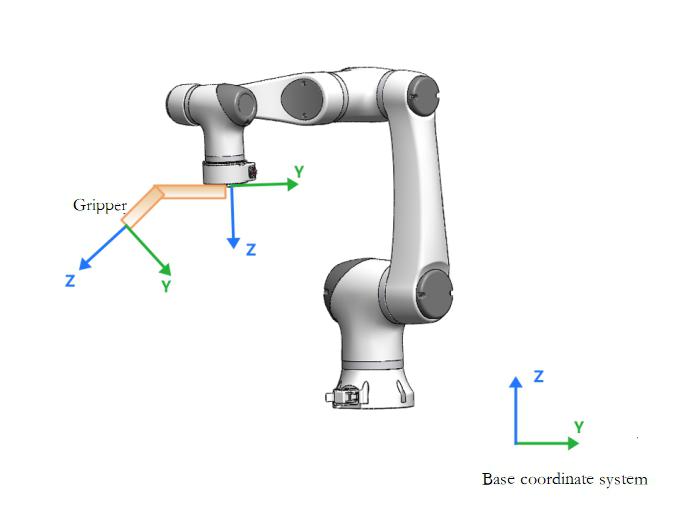
| Configurar los parámetros del robot (TCP, ángulo de instalación, coordenadas del usuario). | |
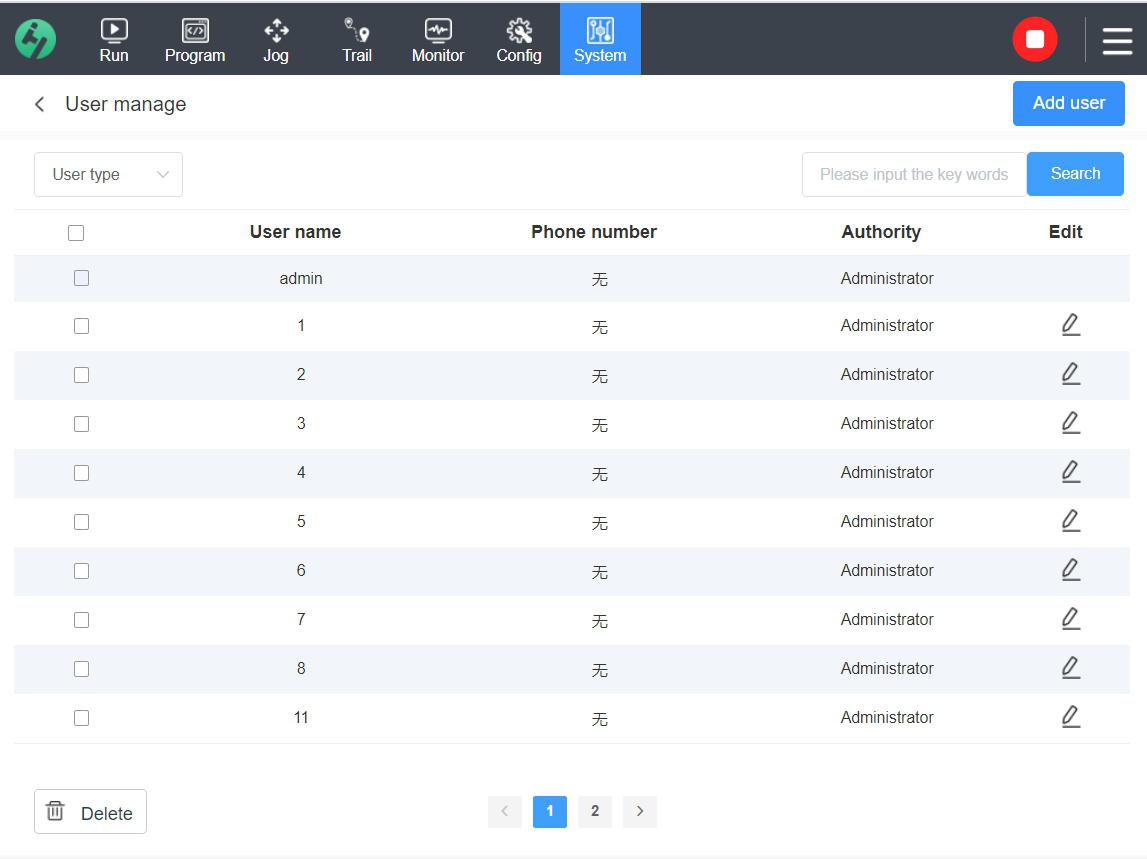
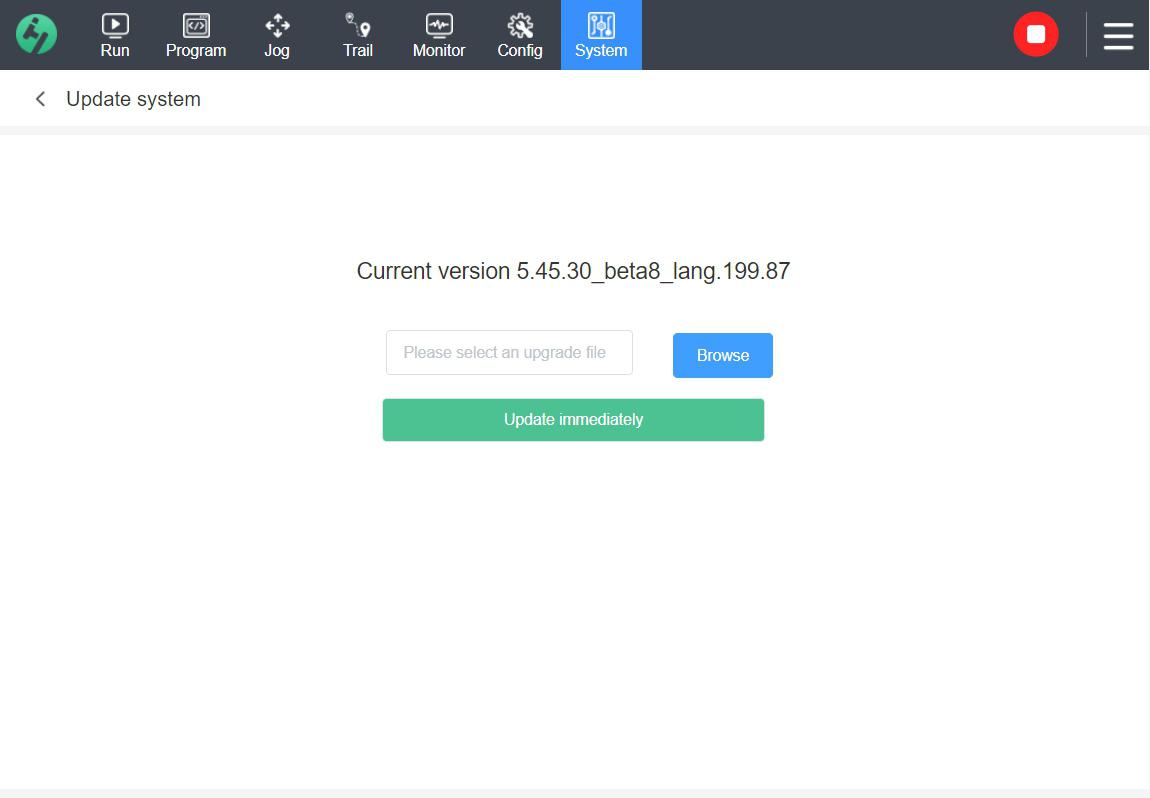
| Gestionar cuentas de usuario y actualizar el sistema. | |
| Ajustar manualmente la postura y posición del robot. | |