Запуск и мониторинг операций
Операция коллаборативных роботов Elfin включает в себя структурированный процесс для обеспечения стабильности и безопасности:
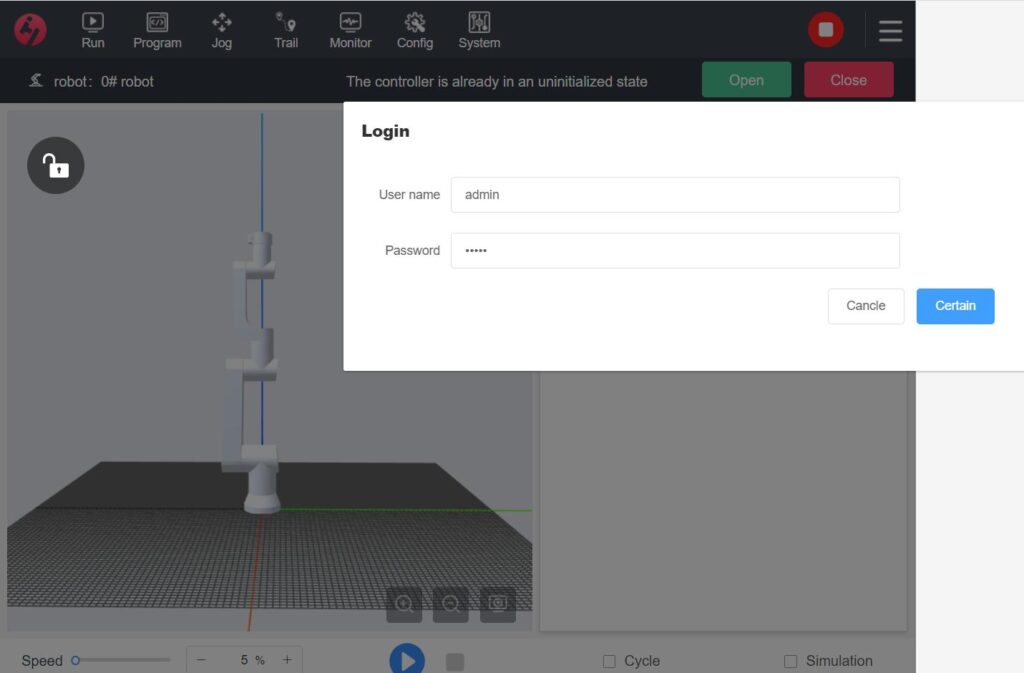
- Инициализация и запуск: После входа в систему пользователи должны включить и активировать робота. Тормоза суставов постепенно отпускаются для безопасной инициализации.
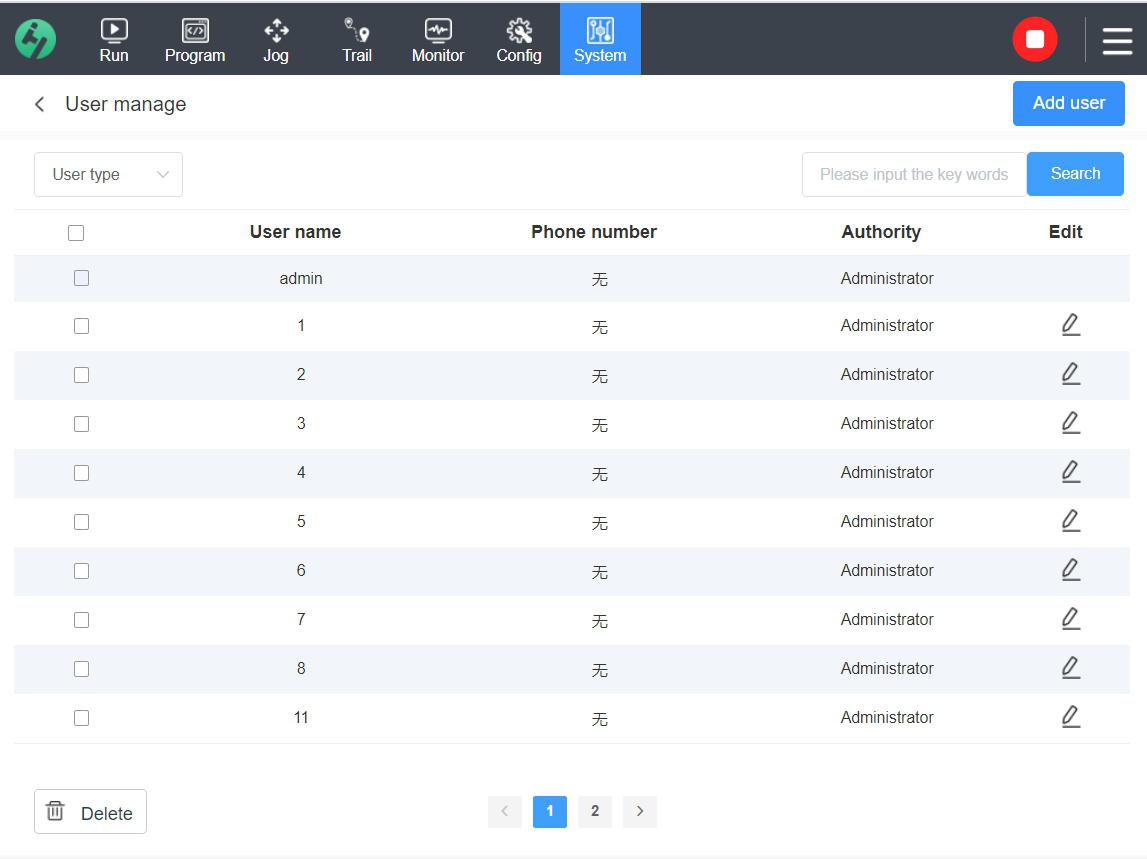
- Выбор программы и мониторинг в реальном времени: Выбирайте и запускайте программы с непрерывным мониторингом состояния входов/выходов, статуса движения и общего состояния робота.
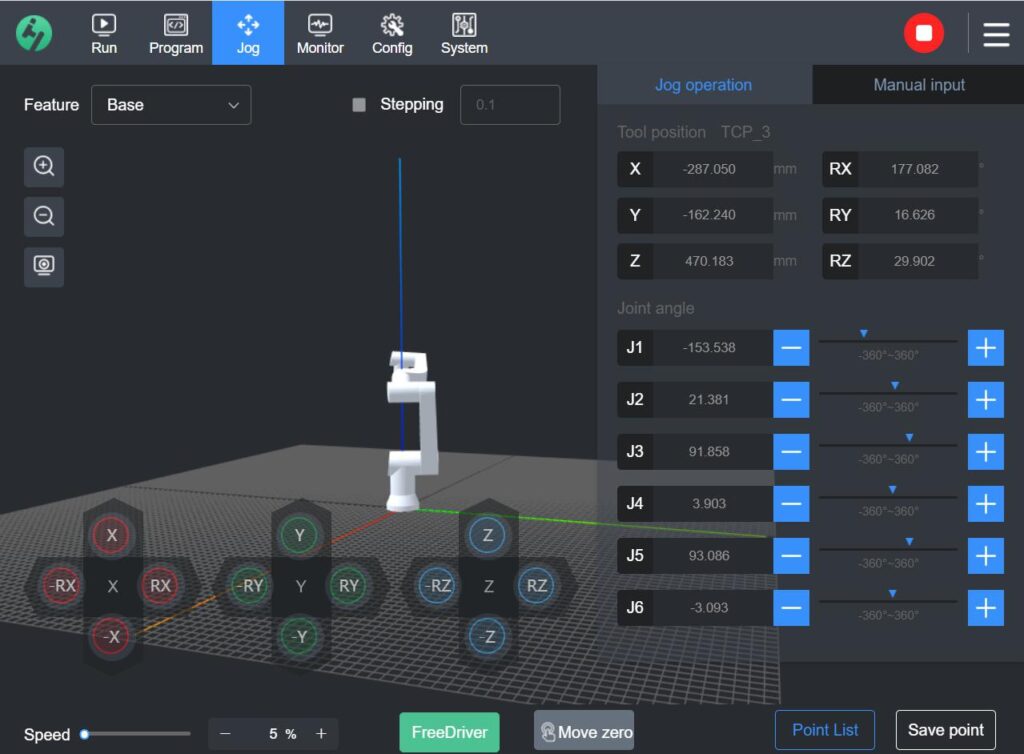
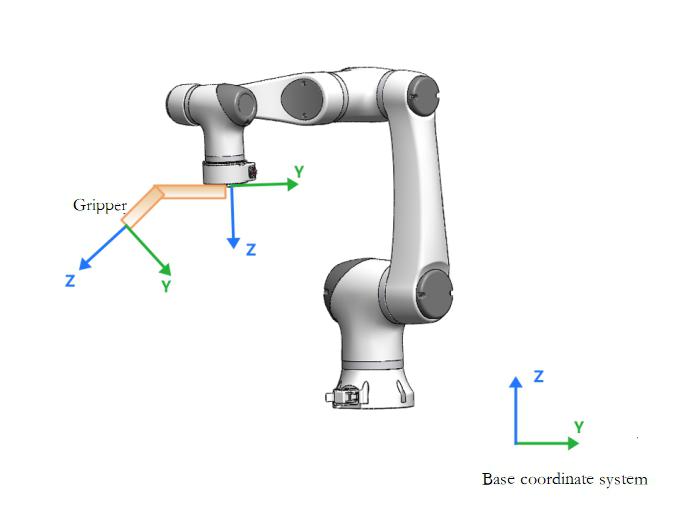
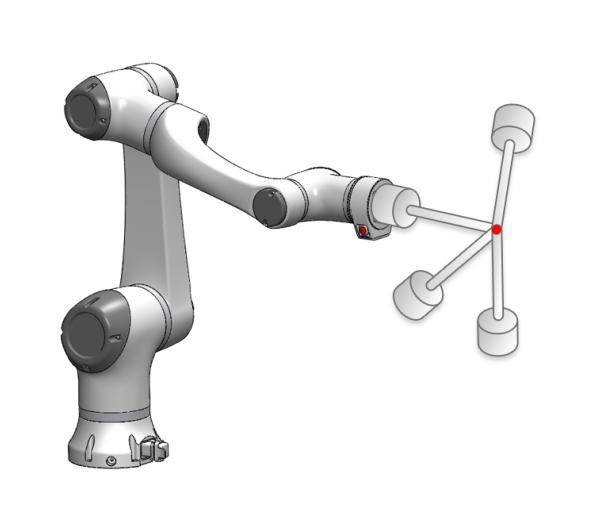
- 3D-визуализация движений робота: Визуализация в реальном времени помогает отслеживать движения робота и динамически корректировать задачи.
- Индикаторы состояния и предупреждения: Уведомления и индикаторные лампочки (красный, зеленый, желтый) предоставляют немедленную обратную связь о рабочем состоянии и любых возникающих проблемах.